| Title |
Data for Sehara et al., 2021 eNeuro (the real-time DeepLabCut project) |
| Authors |
Sehara,Keisuke;Institut für Biologie, Humboldt Universität zu Berlin, Berlin, 10117 Germany.;ORCID:0000-0003-4368-8143
Zimmer-Harwood,Paul;Department of Physiology, Anatomy and Genetics, University of Oxford, Oxford OX1 3PT, United Kingdom.
Colomb,Julien;Institut für Biologie, Humboldt Universität zu Berlin, Berlin, 10117 Germany.;ORCID:0000-0002-3127-5520
Larkum,Matthew E.;Institut für Biologie, Humboldt Universität zu Berlin, Berlin, 10117 Germany.;ORCID:0000-0002-6627-0199
Sachdev,Robert N.S.;Institut für Biologie, Humboldt Universität zu Berlin, Berlin, 10117 Germany.;ORCID:0000-0002-3127-5520
|
| Description |
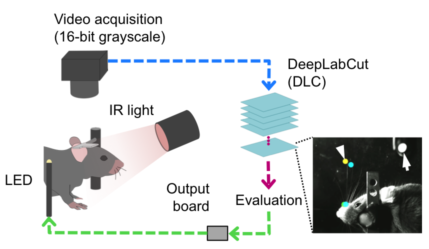
Computer vision approaches have made significant inroads into offline tracking of behavior and estimating animal poses. In particular, because of their versatility, deep-learning approaches have been gaining attention in behavioral tracking without any markers. Here we developed an approach using DeepLabCut for real-time estimation of movement. We trained a deep neural network offline with high-speed video data of a mouse whisking, then transferred the trained network to work with the same mouse, whisking in real-time. With this approach, we tracked the tips of three whiskers in an arc and converted positions into a TTL output within behavioral time scales, i.e 10.5 millisecond. With this approach it is possible to trigger output based on movement of individual whiskers, or on the distance between adjacent whiskers. Flexible closed-loop systems like the one we have deployed here can complement optogenetic approaches and can be used to directly manipulate the relationship between movement and neural activity.
|
| License |
Creative Commons 4.0 Attribution (https://creativecommons.org/licenses/by/4.0/)
|
| References |
Sehara K, Zimmer-Harwood P, Larkum ME, Sachdev RNS (2021) Real-time closed-loop feedback in behavioral time scales using DeepLabCut. [doi:10.1523/eneuro.0415-20.2021] (IsSupplementTo)
|
| Funding |
EU, EU.670118
EU, EU.327654276
EU, EU.720270
EU, EU.785907
EU, EU.945539
DFG, DFG.250048060
DFG, DFG.246731133
DFG, DFG.267823436
|
| Keywords |
Neuroscience
Behavioral tracking
Closed-loop experiment system
|
| Resource Type |
Dataset
|


{kind=link}